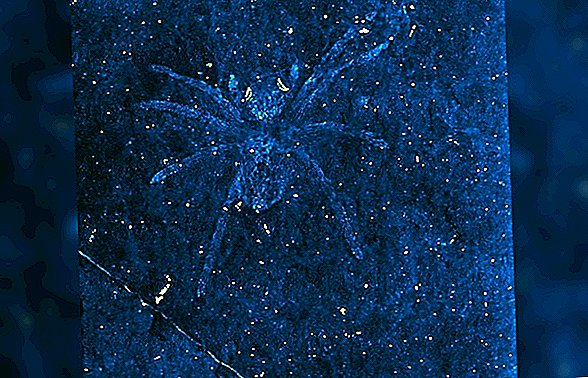
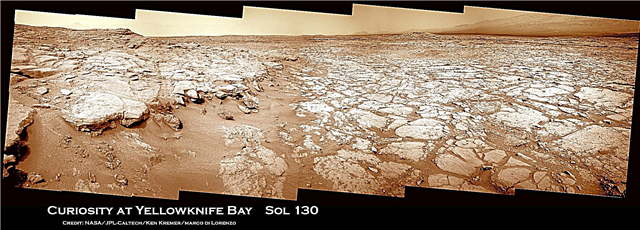
Leyenda de la imagen: Curiosity Scans "Yellowknife Bay" en Sol 130. 17 que se unió desde las imágenes de la cámara de navegación (Navcam). Crédito: NASA / JPL-Caltech / Ken Kremer / Marco Di Lorenzo
Hoy (25 de diciembre) Curiosity celebra su primera Navidad en Marte en un lugar llamado "Yellowknife Bay". Es Sol 138 y hace casi 5 meses desde que el pulso aterrizó el 6 de agosto de 2012 dentro del Cráter Gale. El robot goza de excelente salud.
Mientras tanto, su hermana mayor, Opportunity, pronto celebrará unos insondables 9 años terrestres en Marte en unas pocas semanas el 24 de enero de 2013, en el otro lado del planeta.
El rover Curiosity de la NASA alcanzó la depresión poco profunda llamada "Yellowknife Bay" en Sol 130 (17 de diciembre de 2012) después de descender unos 2 pies (0,5 m) por una suave pendiente dentro de una característica geológica denominada "Glenelg". Vea nuestros mosaicos panorámicos de Yellowknife Bay - arriba y abajo para una vista de contexto.
El equipo científico está buscando una roca interesante para el uso inaugural del martillo perforador de alta potencia.
Según un nuevo informe en SpaceRef, la perforación se ha retrasado debido a la preocupación de que el calentamiento por fricción podría causar la licuación de la roca a una pegajosa "miel marciana" que podría obstruir y dañar seriamente los tamices y mecanismos de manipulación de muestras. Por lo tanto, el equipo está reevaluando cuidadosamente el tipo de objetivo de roca y los procedimientos de operación de perforación antes de comprometerse con el uso inicial del taladro de percusión ubicado en la torreta en el extremo del brazo robótico.
El equipo eligió conducir a "Yellowknife Bay" porque presenta un tipo diferente de terreno geológico en comparación con lo que Curiosity ha conducido anteriormente. El área "Glenelg" se encuentra en la unión de tres tipos diferentes de terreno geológico y es el primer destino científico extendido de Curiosity.
La curiosidad llegó al borde de Yellowknife Bay en Sol 124 y entró en la cuenca en Sol 125 (12 de diciembre) y captó una vista panorámica de exploración que se asomaba a la acogedora localidad. El rover también está utilizando el espectrómetro mineral de rayos X APXS, el láser ChemCam y el lector de imágenes de lente manual MAHLI para recopilar datos iniciales de caracterización científica.

La curiosidad alcanza su punto máximo alrededor de Yellowknife Bay en Sol 125, 12 de diciembre de 2012. El rover continuó conduciendo dentro de la cuenca en busca del primer objetivo de perforación de rocas. Crédito: NASA / JPL-Caltech / Ken Kremer / Marco Di Lorenzo
Hasta ahora, el rover ha recorrido una distancia total de conducción de unos 0,43 millas (700 metros).
La mayoría del equipo de ciencia e ingeniería está obteniendo un descanso muy necesario para pasar tiempo con sus familias después de cargar 11 soles de actividades antes de tiempo para mantener el robot zumbando durante la temporada navideña. Un equipo de esqueletos en JPL está vigilando para hacer frente a cualquier contingencia.
Una de las principales prioridades es adquirir un panorama de color Mastcam de 360 grados de alta resolución. Esto será invaluable para la selección del primer objetivo de roca para perforar y adquirir una muestra del interior, una hazaña nunca antes intentada en Marte.
"Decidimos conducir a un lugar con una buena vista de los afloramientos que rodean la bahía de Yellowknife para permitir una buena toma de imágenes de estos afloramientos antes de las vacaciones", dice el miembro del equipo de ciencia móvil Ken Herkenhoff. "A medida que se devuelven las imágenes durante el descanso, podemos usarlas para ayudar a decidir dónde realizar la primera operación de perforación".
El equipo espera elegir un objetivo de perforación en algún momento de enero de 2013 después de un cuidadoso proceso de selección.
El brazo robótico de 7 pies (2 m) de largo entregará esa muestra inicial de roca pulverizada a los puertos de entrada en la plataforma móvil para su análisis por el dúo de alta potencia de los laboratorios de química miniaturizados llamados Chemin & SAM.

Leyenda de la imagen: Curiosity despliega un brazo robótico en Sol 129 y examina la roca con los instrumentos científicos APXS y MAHLI para caracterizar la composición de la roca y el suelo. Este mosaico compuesto fue cosido a partir de imágenes Navcam del Sol 129 (16 de diciembre) y sols anteriores, y muestra la ubicación del puerto de entrada de muestra Chemin en la plataforma móvil. Crédito: NASA / JPL-Caltech / Ken Kremer / Marco Di Lorenzo
Curiosity pasará al menos otro mes o más investigando Glenelg antes de emprender el viaje de casi un año a su destino principal: las capas sedimentarias de los tramos más bajos de la montaña alta de 3 millas (5 km) llamada Mount Sharp.

Leyenda de la imagen: Escaneando el Monte Sharp desde Yellowknife Bay en Sol 136. Este mosaico fotográfico ensamblado a partir de imágenes de la cámara Mastcam 100 fue capturado por Curiosity en Sol 136 (23 de diciembre), desde su ubicación actual. Muestra una parte del montículo en capas llamado Mount Sharp, su principal destino. Adquirir un panorama en color de alta resolución 360 de Yellowknife Bay es una tarea de alta prioridad para el rover durante la temporada navideña. Crédito: NASA / JPL-Caltech / Marco Di Lorenzo / Ken Kremer
Mientras el cuervo marciano vuela, los impresionantes alrededores del Monte Sharp están a unos 10 km.
El objetivo de la misión es buscar hábitats y determinar si Marte pudo haber sostenido la vida microbiana en el pasado o presente durante la fase de misión primaria de 2 años.

Leyenda de la imagen: Curiosity Traverse Map, Sol 130. Este mapa traza dónde Curiosity condujo entre el aterrizaje en un sitio llamado "Bradbury Landing", y la posición alcanzada durante Sol 130 (17 de diciembre de 2012) en un lugar llamado "Yellowknife Bay" que está dentro de un área llamada "Glenelg". El recuadro muestra las piernas más recientes del recorrido con mayor detalle. Crédito: NASA / JPL-Caltech / Univ. de Arizona